
mce mechatronic engineering electrical ic mcu sensor robot robotic matlab uvision c motor circuit video tracking
วันอาทิตย์ที่ 13 พฤษภาคม พ.ศ. 2555
จดหมายแนะนำตัว!!
ผมเองอยากทำบล็อคที่นำเสนอผลงานตัวเองมานาน เหตุผลหลักคือโชว์ผลงาน เหตุผลรองคือโชว์สาวว่าเราเก่ง(แป่ววว) ในที่นี้ ผมจะรวบรวมเนื้อหาสาระเกี่ยวกับด้านวิศวกรรม โดยเฉพาะสิ่งที่ผมชอบมากที่สุดในสายวิศวกรรม นั้นคือ วิศวกรรมเมคาทรอนิคส์ ผมเองมีโอกาสได้รับการศึกษาที่ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยมหาสารคาม โดยผมเลือกสาขาืนี้ เพราะท่านอาผมท่านแนะนำมา โดยหลักๆผมชอบคอมพิวเตอร์ โปรแกรมมิ่ง และงานด้านหุ่นยนต์มานานแล้ว แต่ก็นะ.... ความฝันมันไม่ได้เหมือนความจริงเสมอไป เพราะผมเองต้องผ่านวิชายากๆ โดยเฉพาะที่เละๆกัน นั้นคือ แมทนั้นแหละ ไหนจะสายเครื่องกลสุดโหด ที่ผมเอฟ แล้วเอฟอีก อย่างวิชา ไดนามิก ระหว่างที่พิมพ์อยู่นี้ ก็เพิ่งติดเอฟเทอร์โมไดนามิก อยู่ แหมม ชีวิตมันช่างรันทด แต่ก็นะ คิดเหรอว่าจะยอม
คงต้องขออภัยท่านผู้อ่านหากอ่านแล้ว รู้สึกรำคาญ ภาษาไม่สละสลวยก็ขออภัยมา ณ ที่นี้ด้วย เพราะตัวกระผมเอง ค่อนข้างก้าวร้าว และเร้าร้อนพอสมควร
ด้วยจิตคารวะ
สราวุธ ขุมทอง (หน่อง)
วันอังคารที่ 1 พฤษภาคม พ.ศ. 2555
DC Motor Control With L298- การควบคุมมอเตอร์กระแสตรงด้วย ไอซี L298
DC Motor Control With L298- การควบคุมมอเตอร์กระแสตรงด้วย ไอซี L298
แท้จริงแล้วการควบคุมมอเตอร์กระแสตรงนี้ มีมากมายหลายวิธี แต่ด้วยเทคโนโลยีสมัยใหม่ ทำให้มีัอะไรๆ ที่มันง่ายขึ้นต่อการควบคุม ในครั้งนี้ ผมได้ยกตัวอย่างการใช้งาน L2998 มาควบคุมมอเตอร์กระแสตรง ด้วยวิธีง่ายๆ แต่ใช้ได้จริง
เรามาดู สเปกแบบคร่าวๆ ไม่ต้องใ่ส่ใจในรายละเอียดมากมายนักกันกว่า
 ในรายละเอียดจาก Data Sheet ที่ผมตัดมาบางส่วน สามารถบอกในสิ่งที่เราต้องการได้พอสมควร
ในรายละเอียดจาก Data Sheet ที่ผมตัดมาบางส่วน สามารถบอกในสิ่งที่เราต้องการได้พอสมควร
1. สามารถใช้แรงดันขับมอเตอร์ได้สูงสุด 50V ( ยังไม่เคยเล่้นขนาดนั้นหรอกครับ แค่ 12 Volt นี้ก็ร้อนละ)
2. สัญญาณ Logic สูงสุด 7 Volt แต่ผมทดสอบจริง 3.3 - 5 Volt ก็เป็น Logic แล้วนะ
3. สามารถขับมอเตอร์ ได้สองตัวด้วย IC ตัวเดียว
4. สามารถใช้การควบคุมแบบ Full Speed หรือแบบ Pulse สำหรับปรับ Speed ได้ด้วยเช่นกัน
5. สามารถควบคุมทิศทางมอเตอร์ด้วยการจ่าย Logic
เอาแบบคราวๆ ก็พอจะไปต่อกันได้ละครับทีนี้เรามาดูขาสำหรับการต่อดีกว่า
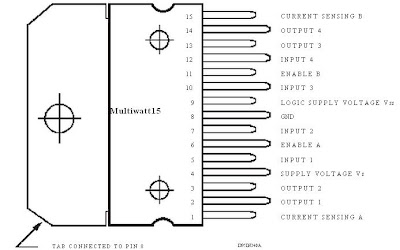
เรามาดูความสามารถของขาแต่ละขาของ IC กันก่อนจะต่อนะครับ
ขา 1 ปกติต่อ Gnd ได้เลย (ผมไม่แน่ใจใช้ทำอะไร ใครรู้ช่วยบอกทีนะครับ)
ขา 2- 3 ต่อเข้าขั้วมอเตอร์
ขา 4 เป็นแรงดันสำหรับมอเตอร์ โดยคำนึงถึงการลักษณะมอเตอร์(Motor Specification)เป็นหลัก
ขา 5 , 7 เป็นขาสำหรับรับ Logic 1(3.3 Volt +) , Logic 0( 0Volt ) เพื่อควบคุมมอเตอร์ A (มอเตอร์ 1)
ขา 6 Enable A คล้ายๆการเปิด-ปิด มอเตอร์ ถ้าเราจ่ายแต่ Logic เข้า 5 , 7 แต่ไม่จ่าย Enable A มอเตอร์ก็จะไม่ทำงานครับ ปกติจ่ายแรงดัน แค่ 3.3 Volt ก็จะเป็นการ Enable มอเตอร์ตัวนั้น
ขา 8 Ground ต้องเป็น Ground ร่วมนะครับ ขา 1 และ 15 ต้องต่อร่วมด้วย
ขา 9 แรงดัน สำหรับ Logic
ขา 10 , 12 เป็นขาสำหรับรับ Logic 1(3.3 Volt +) , Logic 0( 0Volt ) เพื่อควบคุมมอเตอร์ B (มอเตอร์ 2)
ขา 13 , 14 ต่อเข้าขั้วมอเตอร์
ขา 15 ปกติต่อ Gnd
ตัวอย่างการต่อแบบง่ายๆ
แท้จริงแล้วการควบคุมมอเตอร์กระแสตรงนี้ มีมากมายหลายวิธี แต่ด้วยเทคโนโลยีสมัยใหม่ ทำให้มีัอะไรๆ ที่มันง่ายขึ้นต่อการควบคุม ในครั้งนี้ ผมได้ยกตัวอย่างการใช้งาน L2998 มาควบคุมมอเตอร์กระแสตรง ด้วยวิธีง่ายๆ แต่ใช้ได้จริง
เรามาดู สเปกแบบคร่าวๆ ไม่ต้องใ่ส่ใจในรายละเอียดมากมายนักกันกว่า

1. สามารถใช้แรงดันขับมอเตอร์ได้สูงสุด 50V ( ยังไม่เคยเล่้นขนาดนั้นหรอกครับ แค่ 12 Volt นี้ก็ร้อนละ)
2. สัญญาณ Logic สูงสุด 7 Volt แต่ผมทดสอบจริง 3.3 - 5 Volt ก็เป็น Logic แล้วนะ
3. สามารถขับมอเตอร์ ได้สองตัวด้วย IC ตัวเดียว
4. สามารถใช้การควบคุมแบบ Full Speed หรือแบบ Pulse สำหรับปรับ Speed ได้ด้วยเช่นกัน
5. สามารถควบคุมทิศทางมอเตอร์ด้วยการจ่าย Logic
เอาแบบคราวๆ ก็พอจะไปต่อกันได้ละครับทีนี้เรามาดูขาสำหรับการต่อดีกว่า

เรามาดูความสามารถของขาแต่ละขาของ IC กันก่อนจะต่อนะครับ
ขา 1 ปกติต่อ Gnd ได้เลย (ผมไม่แน่ใจใช้ทำอะไร ใครรู้ช่วยบอกทีนะครับ)
ขา 2- 3 ต่อเข้าขั้วมอเตอร์
ขา 4 เป็นแรงดันสำหรับมอเตอร์ โดยคำนึงถึงการลักษณะมอเตอร์(Motor Specification)เป็นหลัก
ขา 5 , 7 เป็นขาสำหรับรับ Logic 1(3.3 Volt +) , Logic 0( 0Volt ) เพื่อควบคุมมอเตอร์ A (มอเตอร์ 1)
ขา 6 Enable A คล้ายๆการเปิด-ปิด มอเตอร์ ถ้าเราจ่ายแต่ Logic เข้า 5 , 7 แต่ไม่จ่าย Enable A มอเตอร์ก็จะไม่ทำงานครับ ปกติจ่ายแรงดัน แค่ 3.3 Volt ก็จะเป็นการ Enable มอเตอร์ตัวนั้น
ขา 8 Ground ต้องเป็น Ground ร่วมนะครับ ขา 1 และ 15 ต้องต่อร่วมด้วย
ขา 9 แรงดัน สำหรับ Logic
ขา 10 , 12 เป็นขาสำหรับรับ Logic 1(3.3 Volt +) , Logic 0( 0Volt ) เพื่อควบคุมมอเตอร์ B (มอเตอร์ 2)
ขา 13 , 14 ต่อเข้าขั้วมอเตอร์
ขา 15 ปกติต่อ Gnd
ตัวอย่างการต่อแบบง่ายๆ

{kind=link}
โดย ขา Enable สามารถจ่ายสัญญาณ PWM เพื่อควบคุมความเร็วมอเตอร์ได้ด้วย แต่ถ้าจะใช้มอเตอร์แบบเต็มสปีดก็สามารถจ่ายเป็น Logic1 , Logic0 ได้ทันที
ขา Input 3 , 4 เมื่อจ่าย Logic1 ที่ ขา Input 3 และจ่าย 0 ที่ Input 4 มอเตอร์ก็จะหมุนไปทิศทางหนึ่ง
แต่ถ้าจ่าย Logic กลับกันมอเตอร์ก็จะกลับทิศจากเดิม
แต่ถ้าจะง่ายกว่านั้น ก็เลือกจ่าย Logic ที่ขาใดขาหนึ่งก็ได้ มอเตอร์ก็จะกลับทิศเช่นกัน ประหยัดการต่อไปอีก แต่วงจรจะดูไม่น่าเชื่อถือเท่าไหร่ (แต่ผมก็ทำอยู่บางครั้งในงานที่ไม่ละเอียดมากนัก)
สราวุธ ขุมทอง
ขา Input 3 , 4 เมื่อจ่าย Logic1 ที่ ขา Input 3 และจ่าย 0 ที่ Input 4 มอเตอร์ก็จะหมุนไปทิศทางหนึ่ง
แต่ถ้าจ่าย Logic กลับกันมอเตอร์ก็จะกลับทิศจากเดิม
แต่ถ้าจะง่ายกว่านั้น ก็เลือกจ่าย Logic ที่ขาใดขาหนึ่งก็ได้ มอเตอร์ก็จะกลับทิศเช่นกัน ประหยัดการต่อไปอีก แต่วงจรจะดูไม่น่าเชื่อถือเท่าไหร่ (แต่ผมก็ทำอยู่บางครั้งในงานที่ไม่ละเอียดมากนัก)
สราวุธ ขุมทอง
สมัครสมาชิก:
ความคิดเห็น (Atom)